机器人认识与自检流程
大约 3 分钟
先对机器人做一个简单介绍,如果你要直接看机器人自检操作,请跳到这里。
认识 - 车号定义
视觉系统通过颜色来识别场地上的球、机器人信息,其中橙色用于识别球。
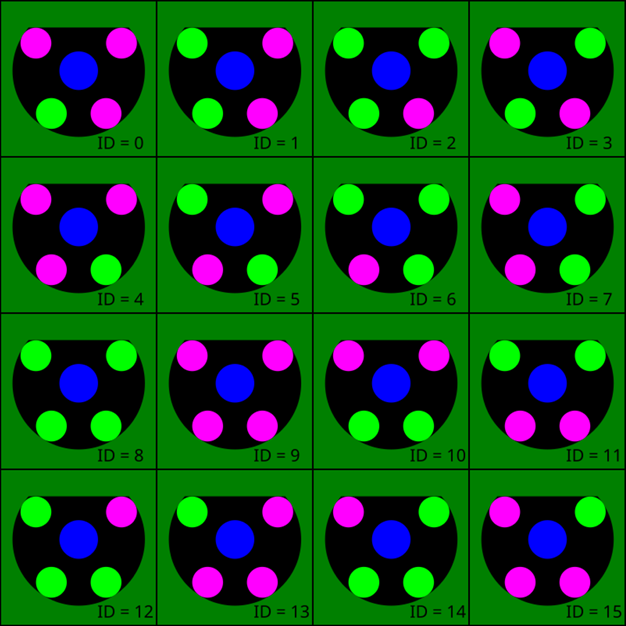
机器人顶盖有四五个色标:
- 中间用蓝色或黄色来标记队伍;
- 四周用荧光绿和荧光粉来标记车号(如下图所示,图已折叠)。
点击展开图片
认识 - 机器人结构参考
点击展开图片
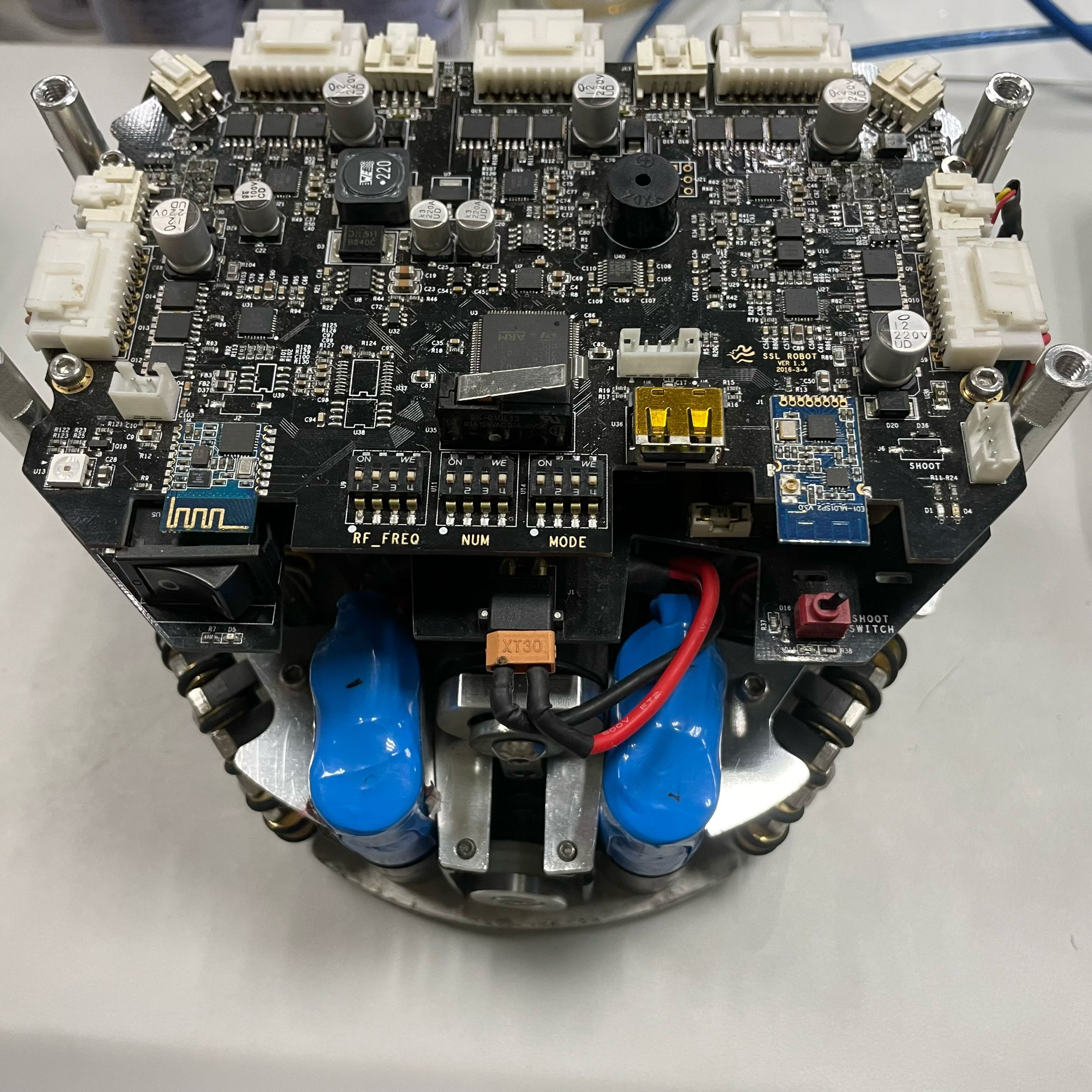
认识 - 机器人主板下方按钮
机器人主板下方从左到右有三行按钮,分别为:
提示
- 本文约定:按钮往下为0,往上为1。
- 我们的机器人(图中)的按钮从左到右都是 1~4 的编号,但是为了方便,约定按照从左到右以二进制高位到地位来。
例如,需要调整某个按钮为 3,即把从左到右四个按钮设置为
0011。
安装步骤图示


RF_FREQ
射频模块,比赛前要调整频道,按照要求来即可。
NUM
用于设置机器人编号,编号要和代码部分相符(还要和机器人外壳的色号对齐)。
MODE
机器人模式。
- 平时全部调整为
MODE = 0,也就是比赛模式。 - 需要自检的时候调整为
MODE = 3,也就是自检模式。
操作 - 进行机器人自检
注意安全
在进行硬件的检查、调整的时候,请务必注意人身安全!!!
前置准备
把机器人平放在平整的地面,并且确保场地空间足够大。
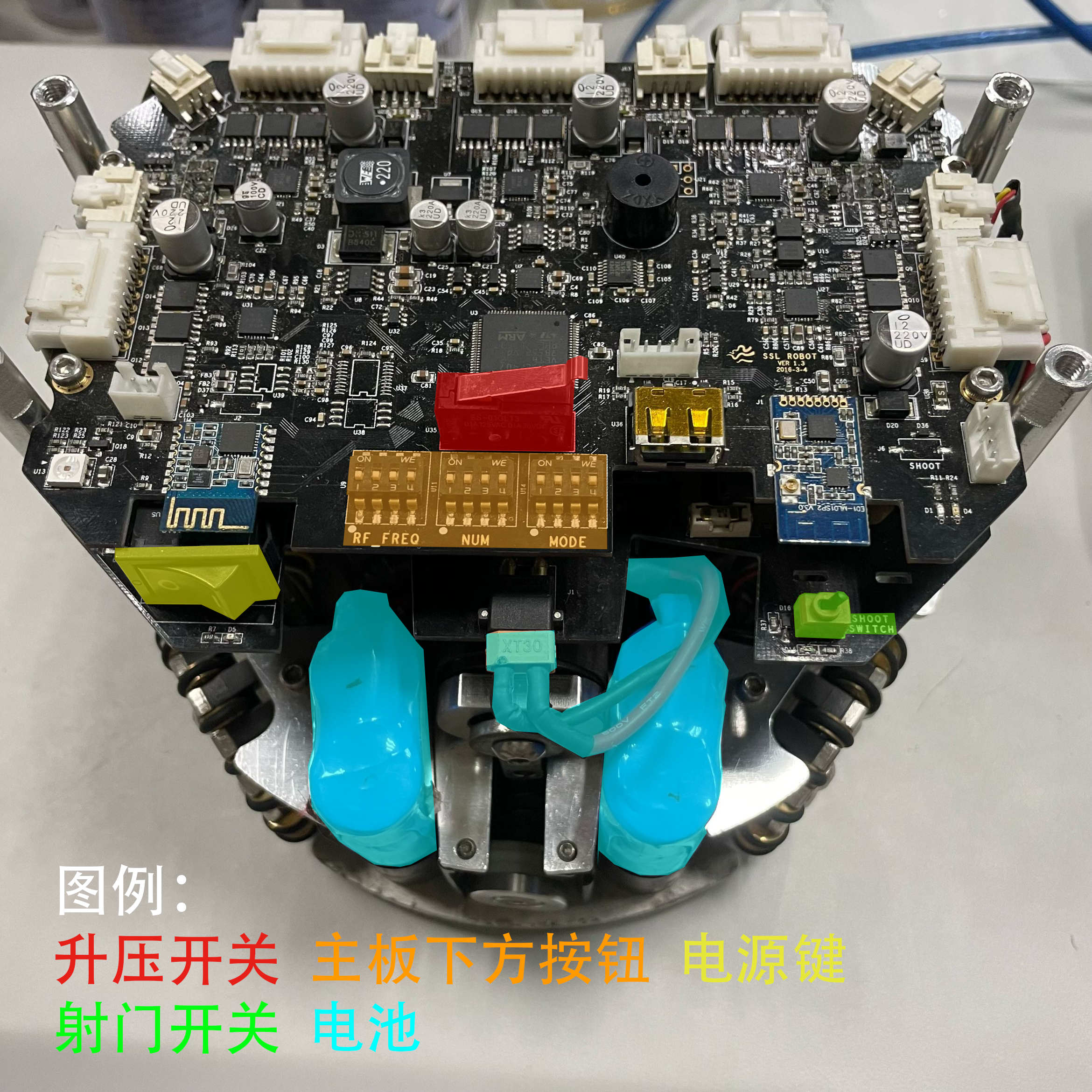
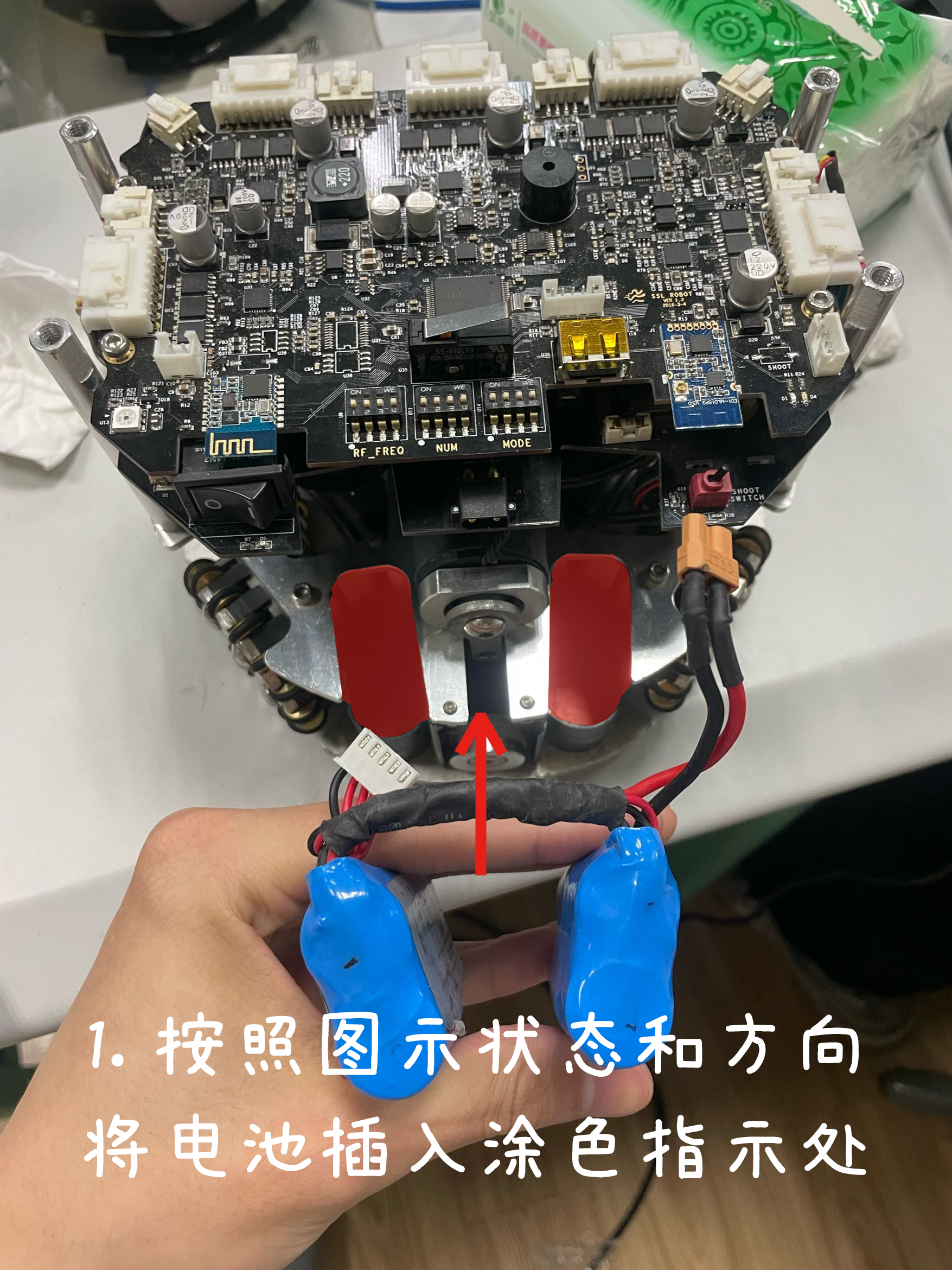
安装电池
电池安装在机器人下方的插槽,连接线朝上(可以扣在机器人中),然后把黄色插口接入(有防呆设计,插不进的时候检查一下插口,不要暴力硬插)。
开机之后机器人持续“嘀、嘀、嘀”叫说明电量低,需要充电。
调整主板下方按钮
射频模块和机器人编号在自检的时候不需要管,你需要把机器人模式调整为自检模式(MODE = 3)
按下电源键开机,开始测试以下环节
- 开机之后,白灯亮表示开始自检。
提示
刚开机,用手轻轻转一下轮子,如果发现四个轮子锁死,说明电机正常。
如果在地上乱转,则说明电机可能有问题。
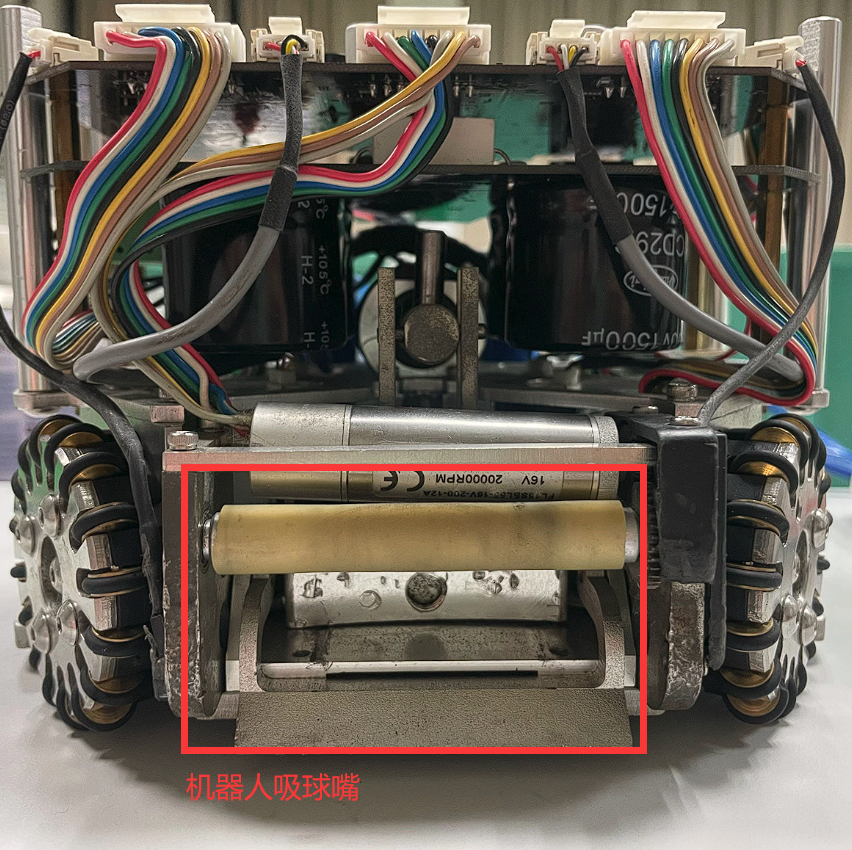
- 测试嘴口:拿球塞到机器人嘴口,机器人的嘴口会开始动(长发的同学注意头发别被卷进去)。
- 判断红外:拿球塞到机器人嘴口,主板上的红外指示灯亮代表正常。
- 射门开关:机器人右下角有个
SHOOT SWITCH,检查是否启动(掰到右侧代表启动)。 - 升压开关:按下之后射门开关边上的红灯会发光。(安装好外壳后,一定要确保一直被按住)
- 检测完毕。